
Overview
My research interests lie in various aspects of the modeling and control of complex, large-scale and uncertain dynamic systems. In particular, my research group is active in the following broad and intersecting areas:- Systems and control theory: stochastic control, robust control.
- Signal processing and decision-making with information constraints, in particular privacy constraints.
- Mobile robotics: navigation and perception; communication, information sharing and decision-making in autonomous robotic networks.
- Modelling, verification and design methodologies for safety-critical networked and embedded control systems, cyber-physical systems.
- Dynamic stochastic resource allocation problems.
- Engineering applications of cooperative and noncooperative game theory for large-scale distributed systems, mean-field games.
- Applications to intelligent infrastructures: transportation systems, smart grids.
Distributed Autonomous Robotic Teams and Multi-Agent Systems
The goal of this research is to design methodologies that permit the efficient management of large collections of semi-autonomous cooperating agents. The main application considered is the design of autonomous mobile robotic networks, but we have also some connected activity in the decentralized dynamic optimization of transportation networks as well as energy systems (smart grids).
Whereas currently deployed unmanned systems are often simply remotely piloted vehicles, our goal is to give them the capability to adapt their behavior in real-time based on the information collected in their environment. This raises challenges associated to the efficient collection of this information (active perception problems), how to share it efficiently between cooperative agents communicating perhaps over ad-hoc networks, and how to allow groups of agents to take decisions that are optimized for the group in a decentralized way using this shared information. We have developped new algorithms for path planning, dynamic stochastic resource allocation, adaptive deployment of robotic networks (for coverage control, source seeking, etc.), or more recently discrete choice problems in large groups using a mean-field game approach. We also maintain an experimental activity in mobile robotics, with projects in cooperative localization, navigation, and mapping, communication networks for drones and cloud robotics, etc.
Links to our mobile robotics laboratory: Home page, VideosSelected Publications
- N. Atanasov, J. Le Ny, K. Daniilidis and G. J. Pappas, Decentralized Active Information Acquisition: Theory and Application to Multi-Robot SLAM. Proceedings of the International Conference on Robotics and Automation (ICRA), Seattle, WA, May 2015.
- R. Salhab, R. P. Malhamé and J. Le Ny, A Dynamic Game Model of Collective Choice in Multi-Agent Systems. Conditionally accepted for publication in the IEEE Transactions on Automatic Control.
- J. Le Ny and G. J. Pappas, Adaptive Deployment of Mobile Robotic Networks. IEEE Transactions on Automatic Control, Vol. 58 (3), pp. 654-666, March 2013.
- J. Le Ny and H. Balakrishnan, Feedback Control of the National Airspace System. AIAA Journal of Guidance, Control and Dynamics, Vol. 34 (3), May/June 2011.
- J. Le Ny, Performance Optimization for Unmanned Vehicle Systems. Ph.D. Thesis, Massachusetts Institute of Technology, Department of Aeronautics and Astronautics, September 2008.
Funding Sources
- Distributed Robust Networks of Autonomous and Embedded Systems (DRONES) (John R. Evans' Leaders Fund, Canadian Foundation for Innovation, 2015).
- High-Precision Radio-Aided Localization for an Inspection Robot (NSERC Engage Grant, 2015).
- Synthesis of Natural Motions for a Robotic Arm Integrated in Media Applications (NSERC Engage Grant, 2014).
- Heterogeneous Unmanned Networked Teams (HUNT) @ UPenn (Office of Naval Research, 2008-2012).

Enforcing Privacy in Sensor and Actuator Networks
A growing number of applications require users to release private data streams for signal processing and decision-making purposes. Examples include smart grids, population health monitoring, online recommendation systems or traffic monitoring and control. For privacy, confidentiality or security reasons, the participants benefiting from the services provided by these systems generally do not want to release more information than strictly necessary. confidentiality or security reasons, the participants benefiting from the services provided by these systems generally do not want to release more information than strictly necessary. Preserving privacy is also relevant say for organizations that participate in various markets (ex: electricity markets) or generally share some data publicly, and would like to ensure that specific confidential information cannot be inferred from this data.
Our aim is to develop the foundations necessary to provide formal privacy guarantees to users contributing such dynamic datasets, while minimizing the impact on the performance of the applications. We showed in particular how tools from systems theory and signal processing can be used to design mechanisms providing differential privacy for dynamic systems. Differential privacy is a popular quantitative notion of privacy initially proposed for static databases. In terms of applications, currently our main focus is on intelligent transportation systems, where an increasingly rich variety of data sources containing personal information are being exploited for system optimization purposes.
Selected Publications
- J. Le Ny and G. J. Pappas, Differentially Private Filtering. IEEE Transactions on Automatic Control, vol. 59 (2), pp. 341-354, February 2014.
- J. Le Ny and G. J. Pappas, Preserving Privacy in Cyberphysical Systems, The Impact of Control Technology, 2nd edition, T. Samad and A.M. Annaswamy (eds.), IEEE Control Systems Society, 2014.
Funding Sources
- Privacy-Preserving Traffic Estimators (FRQNT Early Career Researcher Award, 2014-2017).
- Differential Privacy for Intelligent Transportation Systems: A Model-Based Approach (Foundation of the Ecole Polytechnique Young Faculty Award, 2013).
- Design of Robust, Adaptive and Privacy-Preserving Control Networks (NSERC Discovery grant, 2013-2018).
Design and Verification of Safety-Critical Cyber-Physical Systems
Modern control systems, e.g., for automotive, aircraft or industrial control, are now implemented on distributed embedded processors connected via a shared communication networks. Ideally, the utilization of limited sensing, actuation, computational and communication resources in embedded control systems should be planned together with the design of feedback loops. Currently however, the scheduling of these resources is left by control engineers to the implementation team, which must balance the requirements of the control tasks with those of other functions implemented on the same platform. However, this separation of concerns produces excessively conservative designs, and leads to implemented systems whose performance and safety are increasingly hard to predict and certify.
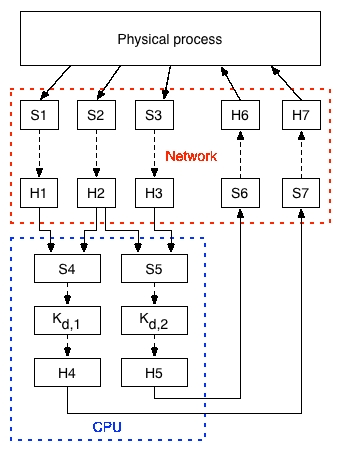
Our contributions include new efficient algorithms for scheduling filters and controllers under limited communication or computation bandwidth, the development of a methodology for the certification of networked embedded controllers based on robust control, or a new architecture for the distributed implementation of controllers over wireless networks.
Selected Publications
- M. Pajic, S. Sundaram, J. Le Ny, G. J. Pappas, R. Mangharam, Closing the Loop: A Simple Distributed Method for Control over Wireless Networks. Proceedings of the 11th International Conference on Information Processing in Sensor Networks (IPSN), Beijing, China, April 2012.
- J. Le Ny, E. Feron, M. A. Dahleh, Scheduling Continuous-Time Kalman Filters. IEEE Transactions on Automatic Control, Vol. 56 (6), June 2011.
- J. Le Ny, G. J. Pappas, Robustness Analysis for the Certification of Digital Controller Implementations. Proceedings of the First International Conference on Cyber-Physical Systems (ICCPS), Stockholm, Sweden, April 2010.
Funding Sources
- Integrated Modular Avionics Demonstration Platform (Bombardier Aerospace and Wind River, 2015).
- Design of Robust, Adaptive and Privacy-Preserving Control Networks (NSERC Discovery grant, 2013-2018).
- Design and Verification of Complex Control Systems (Ecole Polytechnique Startup Grant, 2012-2014).